Our Robots
Current Season:
We have recently finshed competing in the DECODE℠ season presented by RTX© competition season. Find out information about our successes in this season here.
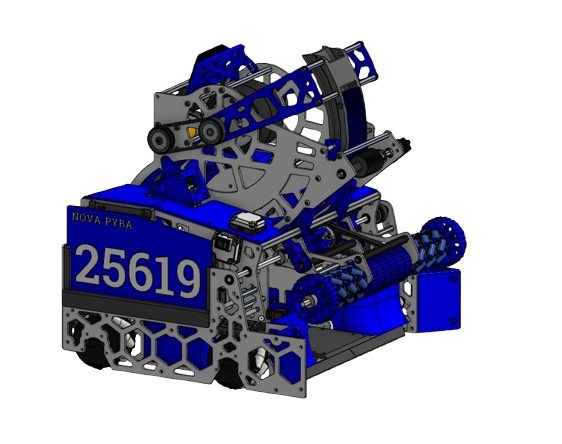
Our robot's name in this season was Drakos, the modern Greek word for "serpent", derived from the ancient Greek word "drakon", which means "the watchful one." Our robot has a serpentine shape and a Limelight vision camera, functioning as a "watchful eye," and making the name a perfect fit.
Our robot consisted of a hooded shooter with an adjustable angle and swyft modular custom drivetrain, which allowed for versatile movement.
Outreach for this season included demonstrating our robot at Northshore Knockout & the LATM/LSTA Teacher Conference, visiting DDG & Intralox, participating in 3 STEM nights, practicing with FTC team 6448, and participating in a scrimmage with FTC teams 23264, 30727, & 18380. Fundraising was mainly achieved through Boo Bags, a Chipotle fundraiser, a grant from the Deborah Rochelle Foundation, and donations from sponsors.
We would not have been able to achieve all we have achieved in this season without our sponsors, which you can find information about here.

Previous seasons:
INTO THE DEEP℠
2024-2025
In the 2024-2025 INTO THE DEEP℠ season, we won the State Championship, won the Think Award for our documentation, and won the Innovate Award for creative robot design twice.





